Go for it!
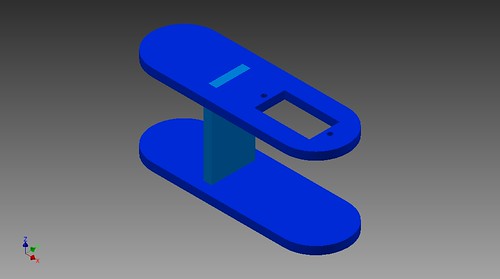
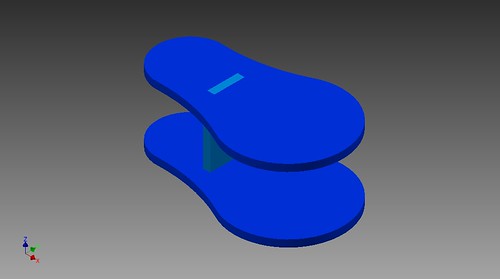
This robot is open source, which totally means go ahead and make one! The pieces are pretty easy to cut out on paper and cardboard too, if you don't have access to a laser cutter. Actually, a cardboard one would probably work a lot better because it will be quite lighter! ;) There's no electronics in this design. I was thinking that Oshawatt could have all of its electronics in a bag sort of like a back pack. I was thinking of going with an Arduino and the servo controller from Adafruit (thanks Adafruit!). As for sensors, probably some force-sensing resistors placed on its ears and arms would be cool. Shoutout to SpikenzieLabs who has laser cut out Oshawatt, thanks!
One of the reasons why this is open source is because I don't have the money to get all the parts for it, like all the servos, leds, and sensors. Meh. So it would be better off here so that maybe hopefully someone will create it and I'll be able to see it work, which would just be really nice to see the creation up and running! :D If you do happen to make an Oshawatt, it would be great if you could take some pics and show em to me on
Google+! :D
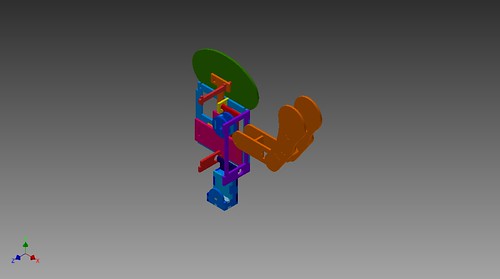
Like all cool robots, Oshawatt does have a personality that I imagine for its character. It's the type of robot that wants a lot of sensory feedback, so it will be waving its arms like crazy, and then humans will interact with it, and then it won't know what to do. When that happens, it becomes sort of shy and starts to bob its head and animate its mouth expressions. Of course, its eyes are an overall indicator of its mood (assuming they are rgb leds). Oh yeah, in case you didn't guess, its favourite dance would definitely be YMCA, though it has trouble with the 'M' letter sometimes.