Calibrating - Code
In order for your RoboBrrd to work with the RoboBrrd Dashboard software, we have to add some code to run on the Brain Board. It will be best if you create a new sketch, and paste your original RoboBrrd code into it.
Remember the basic program structure of RoboBrrd (from
Programming - Intro)? Here is the structure again, with indications of where we will be adding the code.
// 1. includes
// -- (A) we will be adding some variables here -- //
// 2. variable declarations
// -- (B) and adding some more variables here -- //
void setup() {
// 3. initializing everything
}
void loop() {
// 4. doing robobrrd actions!
// -- (C) replacing the contents of loop() -- //
}
// 5. various helper functions
(A) Here are the extra variables that we need
#define DEBUG false
int ticks = 0;
long lastSend = 0;
(B) Here are more variables that we need
// -- lalalala -- //
boolean reading = false;
boolean completed = false;
int msgIndex = 0;
const int msgLen = 12;
char msg[msgLen];
char cmd[2];
char val[4];
int valLen = 0;
double valResult = 0;
// areas //
// !BK:180~
char allCmds[12][2] = { {'B', 'K'},
{'L', 'W'},
{'R', 'W'},
{'A', 'X'},
{'R', '1'},
{'G', '1'},
{'B', '1'},
{'R', '2'},
{'G', '2'},
{'B', '2'},
{'L', 'D'},
{'R', 'D'} };
int cmdCount = 12;
int cmdRow = 99;
// actions //
static int bkOpenSerial = 0;
static int bkClosedSerial = 1;
static int lwingUpSerial = 2;
static int lwingDownSerial = 3;
static int lwingHomeSerial = 4;
static int rwingUpSerial = 5;
static int rwingDownSerial = 6;
static int rwingHomeSerial = 7;
(C) Remove the previous contents of loop(), and add this block of code:
// -- LISTEN -- //
char m;
if(Serial.available() > 0) {
while(Serial.available() > 0) {
m = Serial.read();
if(m == '!') {
reading = true;
}
if(reading) {
if(msgIndex < msgLen) msg[msgIndex++] = m;
}
if(m == '~') {
reading = false;
completed = true;
}
}
}
if(completed) {
if(DEBUG) Serial << "good job" << endl;
for(int i=0; i<msgIndex; i++) {
if(DEBUG) Serial << msg[i];
}
if(DEBUG) Serial << "\n";
if(msg[0] == '!') {
cmd[0] = msg[1];
cmd[1] = msg[2];
}
if(msg[3] == ':') {
for(int i=4; i<(msgIndex-1); i++) {
val[i-4] = msg[i];
}
valLen = msgIndex-5;
}
boolean good = false;
if(msg[(msgIndex-1)] == '~') {
good = true;
}
if(good) {
if(DEBUG) Serial << "good!" << endl;
boolean match = false;
for(int j=0; j<cmdCount; j++) {
if(cmd[0] == allCmds[j][0]) {
if(cmd[1] == allCmds[j][1]) {
if(DEBUG) Serial << "match!" << j << endl;
match = true;
cmdRow = j;
}
}
}
if(match) {
for(int i=0; i<valLen; i++) {
if(DEBUG) Serial << val[i] << " ";
}
if(DEBUG) Serial << endl;
for(int i=0; i<valLen; i++) {
valResult += (val[(valLen-1)-i] - '0')*pow(10, i);
if(DEBUG) Serial << i << ": " << val[(valLen-1)-i] << " " << (val[(valLen-1)-i] - '0') << " " << pow(10, i) << "=" << (val[(valLen-1)-i] - '0')*pow(10, i) << endl;
}
/*
if(valLen > 3) {
valResult += (val[0] - '0')*1000;
valResult += (val[1] - '0')*100;
valResult += (val[2] - '0')*10;
valResult += (val[3] - '0')*1;
} else if(valLen > 2) {
valResult += (val[0] - '0')*100;
valResult += (val[1] - '0')*10;
valResult += (val[2] - '0')*1;
} else if(valLen > 1) {
valResult += (val[1] - '0')*10;
valResult += (val[2] - '0')*1;
} else {
valResult += (val[0] - '0')*1;
}
*/
if(DEBUG) Serial << "Result: " << (int)valResult << endl;
// do something with result
switch(cmdRow) {
case 0: // beak
beak.write((int)valResult);
break;
case 1: // left wing
lwing.write((int)valResult);
break;
case 2: // right wing
rwing.write((int)valResult);
break;
case 3: // action
break;
case 4: {// red1
if((int)valResult == 1) {
digitalWrite(r, HIGH);
} else {
digitalWrite(r, LOW);
}
break;
}
case 5: {// green1
if((int)valResult == 1) {
digitalWrite(g, HIGH);
} else {
digitalWrite(g, LOW);
}
break;
}
case 6: {// blue1
if((int)valResult == 1) {
digitalWrite(b, HIGH);
} else {
digitalWrite(b, LOW);
}
break;
}
case 7: {// red2
if((int)valResult == 1) {
digitalWrite(r, HIGH);
} else {
digitalWrite(r, LOW);
}
break;
}
case 8: {// green2
if((int)valResult == 1) {
digitalWrite(g, HIGH);
} else {
digitalWrite(g, LOW);
}
break;
}
case 9: {// blue2
if((int)valResult == 1) {
digitalWrite(b, HIGH);
} else {
digitalWrite(b, LOW);
}
break;
}
}
// at the end, clean!
valResult = 0;
valLen = 0;
}
}
msgIndex = 0;
completed = false;
}
// -- SENSORS -- //
if(millis()-lastSend >= 20) {
if(ticks%2 == 0) {
Serial << "!" << "LD" << ":" << analogRead(A0) << "~" << endl;
} else {
Serial << "!" << "RD" << ":" << analogRead(A1) << "~" << endl;
}
lastSend = millis();
}
ticks++;
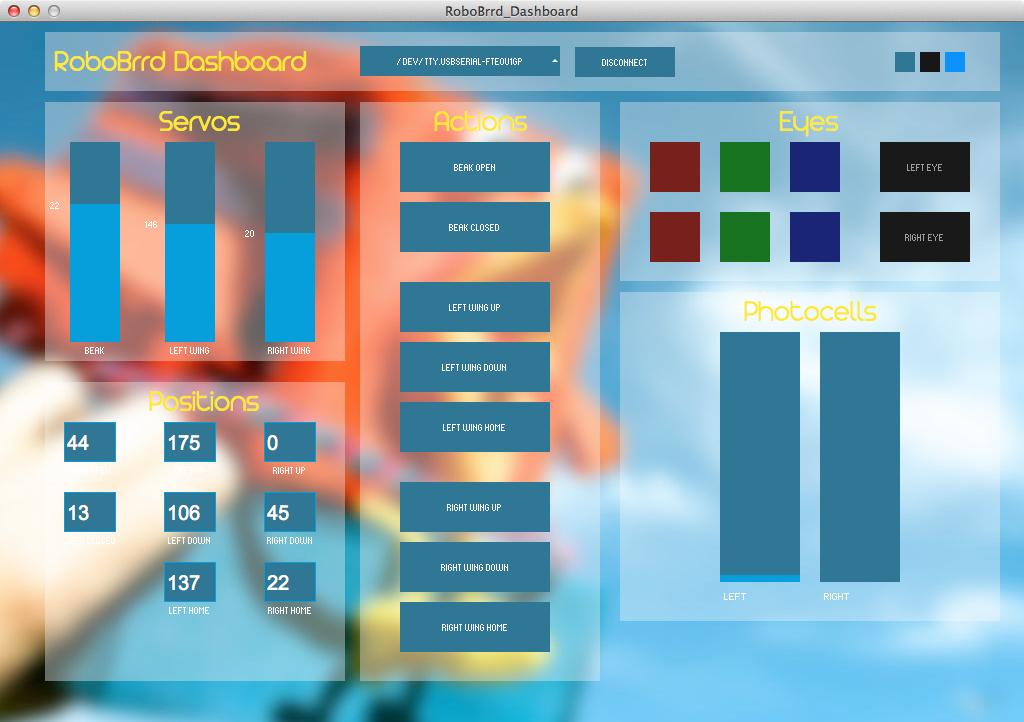
Once you have added this to your code, it's time to upload it to the Brain Board. (If you don't remember how to do this, please revisit
Programming - Step 5) Make sure you don't turn on the serial monitor- it will interfere with the RoboBrrd Dashboard and won't be able to work.
 Store
Store Robots
Robots Learn
Learn Community
Community